Prometheus
Teil der Gemeinde
- Registriert
- 20. Juni 2020
- Beiträge
- 965
- Real Name
- Tobi
Hallo zusammen,
da das ganze nun doch einiges an Volumen bekommen hat, habe ich gedacht das Thema rechtfertigt eigentlich einen eigenen Thread, zum Ideen sammeln und weiterentwickeln.
Angeregt durch den Thread "(Klang)unterschiede zwischen Subwoofer Chassis" habe ich mir einige Gedanken zur Simulation von Lautsprecherchassis gemacht, welche Eigenschaften abseits vom Frequenzgang und den "klassischen" Simulationsmodellen (TSP) klanglich noch mitspielen könnten.
Dazu möchte ich kurz zum Thema TSP ausholen, auch wenn vermutlich ohnehin jeder Bescheid weiß:
Die TSP beschreiben letztendlich die mechanischen, elektrischen und akustischen Eigenschaften des Lautsprecherchassis. Sie bieten einen Weg mit wenigen Zahlenwerten den Feder-Masseschwinger "Lautsprecher" ausreichend gut zu beschreiben, um ein Gehäuse dafür entwickeln zu können.
Der Nachteil an der einfachen Beschreibung ist, dass Parameterverschiebungen nicht berücksichtigt werden können.
Dazu kommt dass alle Simulationsprogramme die ich kenne vorwiegend im Frequenzbereich arbeiten. Das liegt daran dass man im Frequenzbereich über die Übertragungsfunktionen der mit Hilfe der TSP modellierten Ersatzschaltbilder sehr schnell und gut zu Ergebnissen kommt, die man auch sehr fein und genau erweitern kann - siehe zum Beispiel Boxsim.
Das impliziert aber leider auch, dass alles was man sieht der eingeschwungene Zustand ist - das bedeutet, die (Amplituden)Frequenzgangkurve an jedem Punkt gilt streng genommen eigentlich nur für den Fall, dass vorher unendlich lang der Ton der entsprechenden Frequenz abgespielt wurde, und danach auch noch unendlich lange bestehen bleibt.
Das ist in der Regel kein Nachteil - in der Praxis ergeben sich dadurch keine relevanten Einbußen, so weit ich das beurteilen kann - aber im Bereich hoher Auslenkungen kann das dazu führen dass der eine oder andere Effekt verdeckt bleibt.
Der Fokus "meines" Projektes richtet sich von da her auf alles was bei den TSP ausgeblendet wird - und zwar das Verhalten des Chassis bei großen Auslenkungen, und den Ein- und Ausschwingvorgang.
Um diese Dinge ansehen zu können, ist die Analyse im Frequenzbereich nicht tauglich.
Deshalb hatte ich die Idee das ganze Konstrukt "Lautsprecher mit Gehäuse" in den Zeitbereich zu ziehen.
Jetzt wirds kurz theoretisch, für die die es interessiert - eigentlich ists aber nicht wichtig, fürs Ergebnis.
Wer mag darf den folgenden Absatz lesen, wer nicht, darf gerne hinter den "===" wieder weitermachen")
=======================================================
Die Grundidee ist es, die verbundenen Systeme im Zeitbereich über ihre zugehörigen Differentialgleichungen zu beschreiben.
Im Falle des Lautsprechers schaut das so aus:
Die Funktion des Lautsprechers ist, dass die Schwingspule Kraft auf die Membran ausübt, proportional zum Strom der in ihr fliest (der Bxl-Faktor aus den TSP).
Die Kraft auf der Membran resultiert in eine Beschleunigung der selben. Wenn die Membran beschleunigt wird, nimmt ihre Geschwindigkeit zu.
Die Geschwindigkeit der Membran führt dazu dass sich ihr Ort verändert - sie lenkt aus, macht Hub.
Gleichzeitig aber passiert folgendes:
Die Geschwindigkeit der Membran, die ja auch die Geschwindigkeit der Spule ist, induziert eine Gegenspannung in die Spule. Das reduziert die Kraft die auf die Membran wirkt. Das heißt - bei konstanter Spannung an der Schwingspule - je schneller die Membran schon ist, desto geringer wird die Antriebskraft (Back-EMF = u.A. die elektrische Dämpfung).
Gleichzeitig halten einige Kräfte auch gegen die Antriebskraft. Das sind die Federsteifigkeit der Aufhängung (CMS), die proportional zur Auslenkung der Membran ist, die Dämpfung der Aufhängung, die proportional zur Membrangeschwindigkeit ist (QMS), sowie die Masse der Membran, die sich gegen die Beschleunigung wehrt, und von da her eben proportional zur Beschleunigung ist (MMS).
Von da her kann man sagen, die Gegenkraft zum Antrieb (I * Bxl) auf die Membran ist: (Federsteife mal Auslenkung) plus (Dämpfung mal Geschwindigkeit) plus (Masse mal Beschleunigung). Eine Differentialgleichung zweiter Ordnung.
Glücklicherweise ist der SPICE-Algorithmus geeignet um Differentialgleichungen im Zeitbereich durch passende Verfahren zu lösen - nichts anderes passiert in Elektrotechnischen Simulationen auch ständig.
Das funktioniert analog für alles andere auch. Membranverschiebung gibt Druck im Gehäuse, Druck übt über Portfläche Kraft auf das Luftvolumen aus, Luftmasse fängt zu strömen an, übt wiederum Kraft auf Gehäusevolumen aus, etcpp.
Oder auch Compression Drive Slots. Masse wird angekoppelt, Kraft wirkt über Beschleunigung auf die Membran zurück.
=======================================================
Im Endeffekt haben wir also die Möglichkeit nach Eingabe der Parameter anzusehen was genau beim ein- und ausschwingen passiert, wann die Membran wie weit auslenkt, wer wie schnell ist, wer wie viel Luft verschiebt, wie viel Rückstellkraft erzeugt, wie hoch die Strömungsgeschwindigkeit im Port ist, wie hoch die Reynoldszahl ist, etc. pp.
Dazu kommt die Möglichkeit die Nichtlinearitäten des Speakers zu modellieren. Zum Beispiel können wir beim xmax die Spule das Feld verlassen lassen, die elektrische Dämpfung sinkt, die Back-EMF fällt weg, der Spulenstrom steigt, gleichzeitig müssen das Gehäuse und die Aufhängung alleine die beteiligten Massen wieder zurückholen, und so weiter.
Im Moment habe ich folgende Dinge modelliert:
- Lautsprecher mit Dämpfung, nichtlinearer Aufhängung, nichtlinearem Antrieb
- Thermische Kompression der Spule
- Bassreflexgehäuse
- angeschlossener CDS
- KFZ-Innenraum als reines Volumen
Alle Daten stehen, wie gesagt, "in Echtzeit" zur Verfügung.
Das schließt natürlich sämtliche Rückwirkungen mit ein - KFZ auf Gehäuse, Gehäuse auf Lautsprecher, Lautsprecher auf Amp.
Das interessante ist dass sich durch dieses Vorgehen auch viele Parameter von selbst ergeben, ohne sie explizit eingeben zu müssen.
Resonanzstellen entstehen von selbst auf den richtigen Frequenzen, die zugehörigen Impedanzanstiege durch die Rückwirkungen auf die Schwingspule auch, sobald die Spule das Feld verlässt sinkt Qes automatisch ab, sobald die Spule warm wird steigt es mit, die Nullpunktverschiebung entsteht, etc. pp.
Das schöne an dieser Art der Modellierung ist auch, dass alles mögliche mit rein genommen und hinzugefügt werden kann.
Im Moment arbeite ich dran den Übergang von laminarer Strömung zu turbulenter Strömung, mit beteiligtem Anstieg der Strömungsverluste und dadurch im Endeffekt Portkompression zu modellieren.
Die Nichtlinearitäten der Komponenten können beliebig modelliert werden, über eine Beschreibung in Abhängigkeit zur Auslenkung, oder Geschwindigkeit, oder sogar Beschleunigung oder Zeit.
Eigenschaften können erst mal linear oder rudimentär nichtlinear beschrieben, und später feiner ausgestaltet werden.
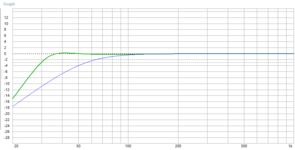
Hier mal der aktuelle Stand, garniert mit einigen "experimentellen" Teilen:

So, langer Sermon, aber wozu das ganze...
Ich erhoffe mir die eine oder andere Erkenntnis darüber was tatsächlich im und am Lautsprecher passiert, wenn Parameter verändert werden.
Am Ende steht vielleicht sogar ein neuer Rückschluss drüber welche Eigenschaften man verfolgen muss, um ein gut klingendes Subwoofergehäuse zu erhalten.
Im Moment baue ich an einigen Stellen, und zwar an folgenden:
- Wie komme ich von den aktuellen Parametern der Membran (Fläche, Geschwindigkeit (t), Beschleunigung (t), ...) auf den Schalldruck im Nahfeld (fürs erste)
- Wie wird der Anstieg der Strömungsverluste im BR-Port modelliert, ohne einen harten Übergang durch die Grenze an einer bestimmten Reynoldszahl zu haben
Die eine oder andere Eigenschaft von Lautsprechern ist mir beim bauen des bisherigen Standes schon klar geworden, die möchte ich aber im folgenden gerne separat diskutieren.
Wer Anregungen, Ideen, Fehlerkorrekturen hat - gerne her damit!
Grüße, Tobi
da das ganze nun doch einiges an Volumen bekommen hat, habe ich gedacht das Thema rechtfertigt eigentlich einen eigenen Thread, zum Ideen sammeln und weiterentwickeln.
Angeregt durch den Thread "(Klang)unterschiede zwischen Subwoofer Chassis" habe ich mir einige Gedanken zur Simulation von Lautsprecherchassis gemacht, welche Eigenschaften abseits vom Frequenzgang und den "klassischen" Simulationsmodellen (TSP) klanglich noch mitspielen könnten.
Dazu möchte ich kurz zum Thema TSP ausholen, auch wenn vermutlich ohnehin jeder Bescheid weiß:
Die TSP beschreiben letztendlich die mechanischen, elektrischen und akustischen Eigenschaften des Lautsprecherchassis. Sie bieten einen Weg mit wenigen Zahlenwerten den Feder-Masseschwinger "Lautsprecher" ausreichend gut zu beschreiben, um ein Gehäuse dafür entwickeln zu können.
Der Nachteil an der einfachen Beschreibung ist, dass Parameterverschiebungen nicht berücksichtigt werden können.
Dazu kommt dass alle Simulationsprogramme die ich kenne vorwiegend im Frequenzbereich arbeiten. Das liegt daran dass man im Frequenzbereich über die Übertragungsfunktionen der mit Hilfe der TSP modellierten Ersatzschaltbilder sehr schnell und gut zu Ergebnissen kommt, die man auch sehr fein und genau erweitern kann - siehe zum Beispiel Boxsim.
Das impliziert aber leider auch, dass alles was man sieht der eingeschwungene Zustand ist - das bedeutet, die (Amplituden)Frequenzgangkurve an jedem Punkt gilt streng genommen eigentlich nur für den Fall, dass vorher unendlich lang der Ton der entsprechenden Frequenz abgespielt wurde, und danach auch noch unendlich lange bestehen bleibt.
Das ist in der Regel kein Nachteil - in der Praxis ergeben sich dadurch keine relevanten Einbußen, so weit ich das beurteilen kann - aber im Bereich hoher Auslenkungen kann das dazu führen dass der eine oder andere Effekt verdeckt bleibt.
Der Fokus "meines" Projektes richtet sich von da her auf alles was bei den TSP ausgeblendet wird - und zwar das Verhalten des Chassis bei großen Auslenkungen, und den Ein- und Ausschwingvorgang.
Um diese Dinge ansehen zu können, ist die Analyse im Frequenzbereich nicht tauglich.
Deshalb hatte ich die Idee das ganze Konstrukt "Lautsprecher mit Gehäuse" in den Zeitbereich zu ziehen.
Jetzt wirds kurz theoretisch, für die die es interessiert - eigentlich ists aber nicht wichtig, fürs Ergebnis.
Wer mag darf den folgenden Absatz lesen, wer nicht, darf gerne hinter den "===" wieder weitermachen
=======================================================
Die Grundidee ist es, die verbundenen Systeme im Zeitbereich über ihre zugehörigen Differentialgleichungen zu beschreiben.
Im Falle des Lautsprechers schaut das so aus:
Die Funktion des Lautsprechers ist, dass die Schwingspule Kraft auf die Membran ausübt, proportional zum Strom der in ihr fliest (der Bxl-Faktor aus den TSP).
Die Kraft auf der Membran resultiert in eine Beschleunigung der selben. Wenn die Membran beschleunigt wird, nimmt ihre Geschwindigkeit zu.
Die Geschwindigkeit der Membran führt dazu dass sich ihr Ort verändert - sie lenkt aus, macht Hub.
Gleichzeitig aber passiert folgendes:
Die Geschwindigkeit der Membran, die ja auch die Geschwindigkeit der Spule ist, induziert eine Gegenspannung in die Spule. Das reduziert die Kraft die auf die Membran wirkt. Das heißt - bei konstanter Spannung an der Schwingspule - je schneller die Membran schon ist, desto geringer wird die Antriebskraft (Back-EMF = u.A. die elektrische Dämpfung).
Gleichzeitig halten einige Kräfte auch gegen die Antriebskraft. Das sind die Federsteifigkeit der Aufhängung (CMS), die proportional zur Auslenkung der Membran ist, die Dämpfung der Aufhängung, die proportional zur Membrangeschwindigkeit ist (QMS), sowie die Masse der Membran, die sich gegen die Beschleunigung wehrt, und von da her eben proportional zur Beschleunigung ist (MMS).
Von da her kann man sagen, die Gegenkraft zum Antrieb (I * Bxl) auf die Membran ist: (Federsteife mal Auslenkung) plus (Dämpfung mal Geschwindigkeit) plus (Masse mal Beschleunigung). Eine Differentialgleichung zweiter Ordnung.
Glücklicherweise ist der SPICE-Algorithmus geeignet um Differentialgleichungen im Zeitbereich durch passende Verfahren zu lösen - nichts anderes passiert in Elektrotechnischen Simulationen auch ständig.
Das funktioniert analog für alles andere auch. Membranverschiebung gibt Druck im Gehäuse, Druck übt über Portfläche Kraft auf das Luftvolumen aus, Luftmasse fängt zu strömen an, übt wiederum Kraft auf Gehäusevolumen aus, etcpp.
Oder auch Compression Drive Slots. Masse wird angekoppelt, Kraft wirkt über Beschleunigung auf die Membran zurück.
=======================================================
Im Endeffekt haben wir also die Möglichkeit nach Eingabe der Parameter anzusehen was genau beim ein- und ausschwingen passiert, wann die Membran wie weit auslenkt, wer wie schnell ist, wer wie viel Luft verschiebt, wie viel Rückstellkraft erzeugt, wie hoch die Strömungsgeschwindigkeit im Port ist, wie hoch die Reynoldszahl ist, etc. pp.
Dazu kommt die Möglichkeit die Nichtlinearitäten des Speakers zu modellieren. Zum Beispiel können wir beim xmax die Spule das Feld verlassen lassen, die elektrische Dämpfung sinkt, die Back-EMF fällt weg, der Spulenstrom steigt, gleichzeitig müssen das Gehäuse und die Aufhängung alleine die beteiligten Massen wieder zurückholen, und so weiter.
Im Moment habe ich folgende Dinge modelliert:
- Lautsprecher mit Dämpfung, nichtlinearer Aufhängung, nichtlinearem Antrieb
- Thermische Kompression der Spule
- Bassreflexgehäuse
- angeschlossener CDS
- KFZ-Innenraum als reines Volumen
Alle Daten stehen, wie gesagt, "in Echtzeit" zur Verfügung.
Das schließt natürlich sämtliche Rückwirkungen mit ein - KFZ auf Gehäuse, Gehäuse auf Lautsprecher, Lautsprecher auf Amp.
Das interessante ist dass sich durch dieses Vorgehen auch viele Parameter von selbst ergeben, ohne sie explizit eingeben zu müssen.
Resonanzstellen entstehen von selbst auf den richtigen Frequenzen, die zugehörigen Impedanzanstiege durch die Rückwirkungen auf die Schwingspule auch, sobald die Spule das Feld verlässt sinkt Qes automatisch ab, sobald die Spule warm wird steigt es mit, die Nullpunktverschiebung entsteht, etc. pp.
Das schöne an dieser Art der Modellierung ist auch, dass alles mögliche mit rein genommen und hinzugefügt werden kann.
Im Moment arbeite ich dran den Übergang von laminarer Strömung zu turbulenter Strömung, mit beteiligtem Anstieg der Strömungsverluste und dadurch im Endeffekt Portkompression zu modellieren.
Die Nichtlinearitäten der Komponenten können beliebig modelliert werden, über eine Beschreibung in Abhängigkeit zur Auslenkung, oder Geschwindigkeit, oder sogar Beschleunigung oder Zeit.
Eigenschaften können erst mal linear oder rudimentär nichtlinear beschrieben, und später feiner ausgestaltet werden.
Hier mal der aktuelle Stand, garniert mit einigen "experimentellen" Teilen:
So, langer Sermon, aber wozu das ganze...
Ich erhoffe mir die eine oder andere Erkenntnis darüber was tatsächlich im und am Lautsprecher passiert, wenn Parameter verändert werden.
Am Ende steht vielleicht sogar ein neuer Rückschluss drüber welche Eigenschaften man verfolgen muss, um ein gut klingendes Subwoofergehäuse zu erhalten.
Im Moment baue ich an einigen Stellen, und zwar an folgenden:
- Wie komme ich von den aktuellen Parametern der Membran (Fläche, Geschwindigkeit (t), Beschleunigung (t), ...) auf den Schalldruck im Nahfeld (fürs erste)
- Wie wird der Anstieg der Strömungsverluste im BR-Port modelliert, ohne einen harten Übergang durch die Grenze an einer bestimmten Reynoldszahl zu haben
Die eine oder andere Eigenschaft von Lautsprechern ist mir beim bauen des bisherigen Standes schon klar geworden, die möchte ich aber im folgenden gerne separat diskutieren.
Wer Anregungen, Ideen, Fehlerkorrekturen hat - gerne her damit!
Grüße, Tobi



") :
: